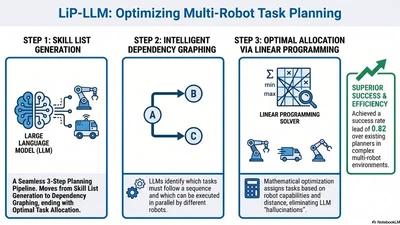
LiP-LLM: Integrating Linear Programming and Dependency Graph With LLMs for Multi-Robot Task Planning
We propose a multi-robot task planning method that integrates Large Language Models (LLMs) with linear programming and dependency graphs. By combining the natural-language …