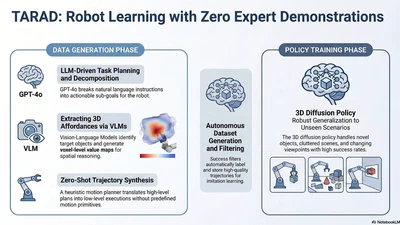
TARAD: Task-Aware Robot Affordance-Centric Diffusion Policy Learned From LLM-Generated Demonstrations
We propose a task-aware, robot-affordance-centric diffusion policy. By integrating the notion of affordances into a diffusion model, the proposed method enables more adaptive …