TARAD: Task-Aware Robot Affordance-Centric Diffusion Policy Learned From LLM-Generated Demonstrations
2025年10月1日· ·
0 min read
·
0 min read
Takato Horii
Authors
Site Hu, Takayuki Nagai, Takato Horii
Abstract
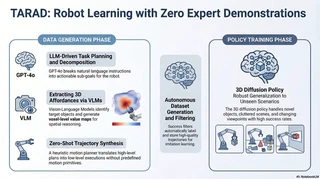
We propose a task-aware, robot-affordance-centric diffusion policy. By integrating the notion of affordances into a diffusion model, the proposed method enables more adaptive behavior generation for robot manipulation tasks.
Type
Publication
IEEE Robotics and Automation Letters, 10(10)

Authors
Takato Horii
(he/him)
Associate Professor
Associate Professor at Graduate School of Engineering Science, Osaka University.
Research interests include cognitive developmental robotics, computational modeling
of emotional development, and human-robot interaction.