LiP-LLM: Integrating Linear Programming and Dependency Graph With LLMs for Multi-Robot Task Planning
2025年2月1日· ·
0 min read
·
0 min read
Takato Horii
Authors
Kazuma Obata, Tatsuya Aoki, Takato Horii, Tadahiro Taniguchi, Takayuki Nagai
Abstract
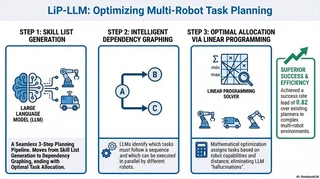
We propose a multi-robot task planning method that integrates Large Language Models (LLMs) with linear programming and dependency graphs. By combining the natural-language understanding capabilities of LLMs with optimization techniques, the method efficiently generates plans for complex multi-robot cooperative tasks.
Type
Publication
IEEE Robotics and Automation Letters, 10(2), 1122-1129

Authors
Takato Horii
(he/him)
Associate Professor
Associate Professor at Graduate School of Engineering Science, Osaka University.
Research interests include cognitive developmental robotics, computational modeling
of emotional development, and human-robot interaction.