Active Inference Through Energy Minimization in Multimodal Affective Human-Robot Interaction
2021年7月1日· ·
0 min read
·
0 min read
Takato Horii
Authors
Takato Horii, Yukie Nagai
Abstract
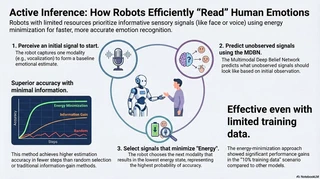
Based on the framework of active inference, we propose an energy-minimization approach to multimodal affective human-robot interaction. The proposed mechanism enables a robot to actively infer and respond to emotional signals.
Type
Publication
Frontiers in Robotics and AI, 8, 684401

Authors
Takato Horii
(he/him)
Associate Professor
Associate Professor at Graduate School of Engineering Science, Osaka University.
Research interests include cognitive developmental robotics, computational modeling
of emotional development, and human-robot interaction.