New Paper Published in IEEE Access: Distance-Aware World Model-based Reinforcement Learning
Our paper “Distance-Aware World Model-based Reinforcement Learning for Mobile Manipulation Behaviors,” authored by Xiaoxu Feng (doctoral student) and Takato Horii, has been accepted and published as Early Access (open access, CC-BY) in IEEE Access.
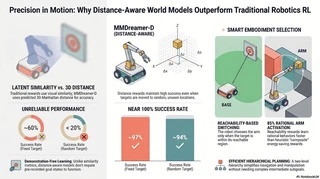
This work tackles end-to-end learning of mobile manipulation by jointly addressing embodiment selection (whether to move the base or use the arm) and motion planning within a single world model-based reinforcement learning framework. To overcome the limitations of similarity-based rewards in latent space, we explicitly incorporate 3D spatial information into the world model and derive a distance-aware reward for policy training. At the high level, a reachability-based reward enables rational switching between locomotion and manipulation. Extensive simulation experiments with both fixed and randomized target settings show that our approach achieves near-perfect motion success rates and substantially more rational arm activations than baseline composite-reward formulations.
This work was supported by JST Moonshot R&D (JPMJMS2011).
- Authors: Xiaoxu Feng, Takato Horii (Graduate School of Engineering Science, The University of Osaka)
- Journal: IEEE Access (Early Access, May 21, 2026)
- DOI: 10.1109/ACCESS.2026.3695694
- Paper: IEEE Xplore
