IEEE Accessに論文が採択・公開されました(モバイルマニピュレーション向け距離認識世界モデル強化学習)
2026年5月21日
·
2 分で読める
Xiaoxu Fengさん(博士後期課程)と堀井隆斗による論文 “Distance-Aware World Model-based Reinforcement Learning for Mobile Manipulation Behaviors” が、IEEE Access に採択され、Early Accessとしてオープンアクセス(CC-BY)で公開されました。
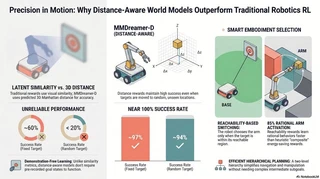
本研究では、移動マニピュレーション(mobile manipulation)における身体性選択(embodiment selection)と動作計画(motion planning)の双方を、ひとつの世界モデルベースの強化学習フレームワークに統合的に扱う手法を提案しています。具体的には、潜在状態の類似度に依存していた従来の報酬設計の限界を克服するため、3次元空間情報を世界モデルに明示的に組み込み、距離を意識した報酬(distance-aware reward)を導出します。高レベルの身体性選択にはreachability報酬を併用することで、移動と腕動作の切り替えを合理的に行うエンドツーエンド学習を実現しました。シミュレーション評価では、固定/ランダム目標位置のいずれにおいても従来の類似度報酬を大きく上回る成功率を達成しています。
本研究はJST Moonshot R&D(JPMJMS2011)の支援を受けて実施されました。
- 著者:Xiaoxu Feng, Takato Horii(大阪大学 大学院基礎工学研究科)
- 掲載誌:IEEE Access(Early Access, 2026年5月21日)
- DOI:10.1109/ACCESS.2026.3695694
- 論文:IEEE Xplore

著者
堀井隆斗
(he/him)
准教授
大阪大学大学院基礎工学研究科 准教授。
認知発達・記号創発ロボティクス、感情発達の計算論的モデリング、
ロボット学習、ヒューマンロボットインタラクションを専門とする。